

Сборка робота по инструкции
Соберите робота, следуя инструкции. Если робот у вас уже собран, вы можете установить на него ИК-приёмник самостоятельно. Однако, обратите внимание, что для прохождения всех дальнейших уроков на роботе также должны быть установлены:
- 1х ИК-приёмник;
- 2х датчик линии;
- 1х ультразвуковой датчик расстояния.
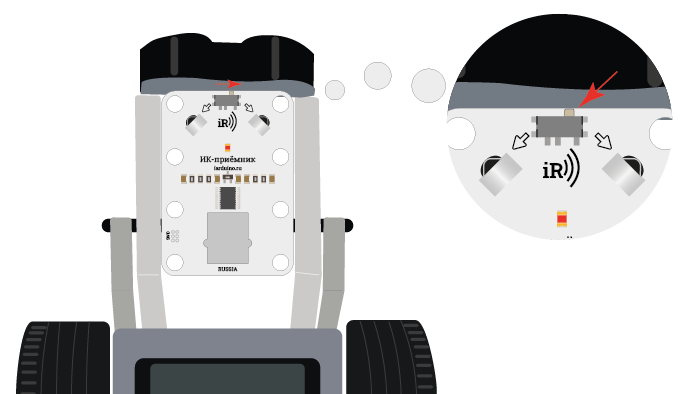
Важно! Переведите переключатель на ИК-приёмнике в сторону, с которой расположены знаки на трассе. Стандартно — направо.
Подключение датчиков и моторов к портам
Датчики:
1 | 2 | 3 | 4 |
Левый датчик линии | Ультразвуковой датчик расстояния | ИК-приёмник | Правый датчик линии |
Моторы:
A | D |
Левый мотор | Правый мотор |
Изображение робота в сборе





Обсуждение