

В этом уроке
- Что такое I2C и в чем её удобство
- Адресация модулей
- Как изменить адрес модуля и почему это важно
Видео версия урока
Видео 358
Назначение и принцип работы шины I2C
Мы уже говорили о том, что к контроллеру можно подключать различные модули, и более того, уже даже подключали зуммер и модули-моторы. Модули могут либо просто подключаться к выводам контроллера, как было в случае с зуммером, так и соединяться одной шиной, как, например, модули моторов.
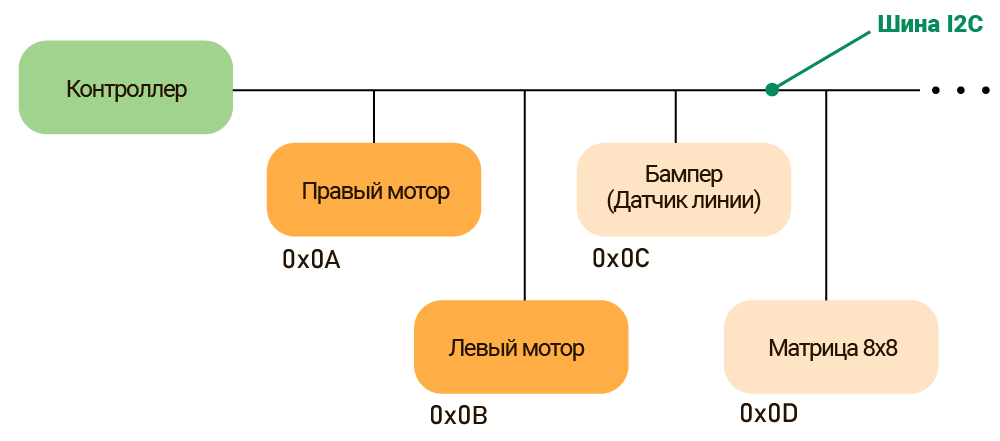
Все модули, которые управляются по шине I2C, на самом деле соединены одним шлейфом. Это позволяет, используя всего два вывода контроллера, подключить к нему более сотни устройств! (Поясним: мотор подключен шиной из 4-х проводов: два из них — питание: + и -, и еще два — именно провода шины I2C, поэтому, можно сказать, что для управления модулем требуется всего два провода).
Для того, чтобы контроллер мог управлять каждым модулем по отдельности, существуют адреса. Контроллер посылает команды: что необходимо сделать устройству и по какому адресу.
Если адреса устройств разные, то всё работает, как задумано: нужное устройство по нужному адресу выполняет предназначенные для него команды. Однако, если адреса устройств совпадают, то контроллер не сможет отличить модули друг от друга. Для того, чтобы всё работало, как задумано, каждый модуль в пределах одной шины должен иметь свой уникальный адрес.
Изменение I2C-адресов модулей
Изначально все наши модули имеют адрес 0х09, но, как мы уже знаем, все модули должны иметь разные адреса. Давайте сразу поменяем адреса всех модулей, с которыми будем работать. Для того, чтобы его изменить, воспользуйтесь скетчем ниже.
Важно! При изменении адреса к контроллеру должен быть подключен только один модуль.
Для того, чтобы случайно не ошибиться при установке адресов и в дальнейшем быть уверенным, что модули настроены верно, предлагаем подключить их напрямую к контроллеру по очереди, устанавливая нужные адреса.
Для этого потребуется открутить 4 винта и снять модуль питания, после чего достать контроллер.
*Шлейфы на картинке не показаны, их можно не отключать
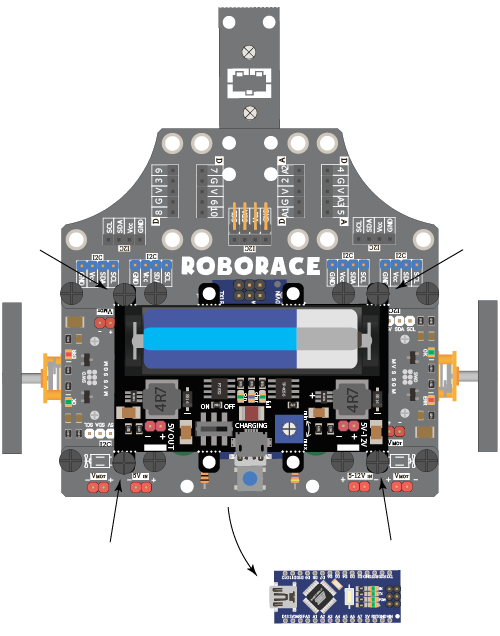
После этого подключаем к контроллеру модуль правый мотор, как показано на рисунке (модуль с платы снимать не нужно):
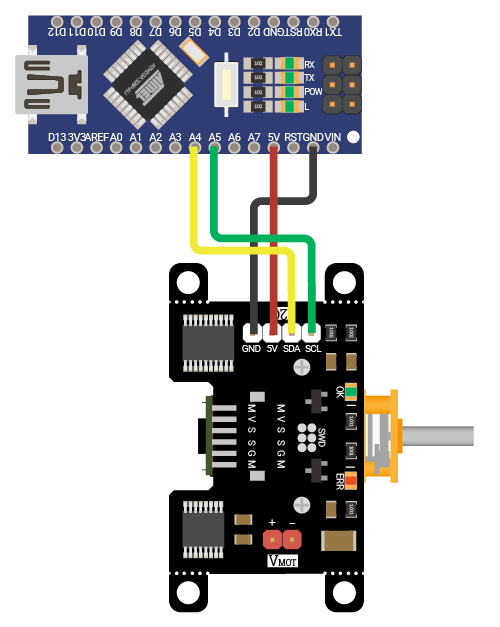
| Выводы модуля | Выводы контроллера |
| GND | GND |
| 5V | 5V |
| SDA | A4 |
| SCL | A5 |
Все модули имеют одинаковые названия выводов и подключаются к контроллеру аналогично.
После того, как Вы подключили правый мотор к контроллеру, загрузите следующий скетч. После загрузки адрес модуля будет изменён на тот, который Вы указали в начале скетча (3 строка).
// ПРИМЕР СМЕНЫ АДРЕСА МОДУЛЯ I2C-FLASH: // * Строки со звёздочкой являются необязательными
//
uint8_t newAddress = 0x0A; // Назначаемый модулю адрес (0x07 < адрес < 0x7F)
//
#include <Wire.h> // * Подключаем библиотеку для работы с аппаратной шиной I2C
#include <iarduino_I2C_Address.h> // Подключаем библиотеку для работы с адресами модулей линейки I2C-flash
iarduino_I2C_Address j; // Объявляем объект j для работы с модулем I2C-flash. Адрес модуля будет определен автоматически
// Если адрес модуля известен, то его можно указать при создании объекта, например, iarduino_I2C_Address j(0xA0);
void setup(){ //
delay(500); // * Ждём завершения переходных процессов, связанных с подачей питания
Serial.begin(9600); //
while(!Serial){;} // * Ждём завершения инициализации шины UART
j.begin(); // Инициируем работу с модулем
while(!j){;} // * Запрещаем дальнейшую работу, если модуль не инициализирован
Serial.print("Найден модуль 0x"); //
Serial.println( j, HEX ); // Выводим текущий адрес модуля
j=newAddress; // Меняем адрес модуля на newAddress
if(j==newAddress){ // * Проверяем новый адрес модуля
Serial.println("Адрес модуля изменён"); // * Успех записи нового адреса можно проверить по результату присвоения: if( j=newAddress ){/*успешно*/;}else{/*провал*/;}
} // *
Serial.print("Текущий адрес модуля 0x"); //
Serial.println( j, HEX ); // Выводим текущий адрес модуля
} //
//
void loop(){ //
} //
Адреса для модулей:
| Модуль | Адрес |
| Правый мотор | 0х0А |
| Левый мотор | 0х0В |
| Бампер-датчик линии | 0х0С |
| Матрица 8х8 | 0х0D |
Больше устройств I2C на машинке не предвидится. Остальные модули работают не по шине I2C (они просто подключаются к выводам контроллера).
Во время загрузки Вы можете открыть монитор порта и увидеть информацию о том, что адрес был изменён.
Измените таким же образом адреса всех модулей на указанные в таблице.
Теперь можно снова собрать машинку и двигаться дальше. Наши модули готовы к работе.
Проверка моторов
Для проверки того, правильно ли мы установили адреса, давайте загрузим следующий скетч и посмотрим результат его работы в мониторе порта. Если всё сделано верно, Вы увидите соответствующие надписи.
#include <Wire.h> // Подключаем библиотеку для работы с шиной I2C
#include <iarduino_I2C_Motor.h> // Подключаем библиотеку для работы с мотором
iarduino_I2C_Motor mot_R (0x0A); // Объявляем объект mot_R для правого мотора с указанием адреса 0х0А
iarduino_I2C_Motor mot_L (0x0B); // Объявляем объект mot_L для левого мотора с указанием адреса 0х0В
void setup(){
Serial.begin(9600); // Инициируем работу монитора порта на скорости 9600 бод
if (mot_R.begin()) Serial.println("Отлично, найден мотор с адресом 0x0A"); // Инициируем работу с правым мотором. Если инициализация прошла успешно, выводим сообщение об успехе
else Serial.println("Что-то не так... Мотор с адресом 0x0A не найден"); // Иначе - сообщение об ошибке
if (mot_L.begin()) Serial.println("Отлично, найден мотор с адресом 0x0B"); // Инициируем работу с левым мотором. Если инициализация прошла успешно, выводим сообщение об успехе
else Serial.println("Что-то не так... Мотор с адресом 0x0B не найден"); // Иначе - сообщение об ошибке
}
void loop(){
} 




Обсуждение